
Products













BlueBoat Uncrewed Surface Vessel
SKU: BR-101447
Select variant...
inc. VAT
The BlueBoat is the planet’s most affordable robotic surface vessel. With an innovative hull design, endless expansion possibilities, and open-source BlueOS software, it’s the ideal platform for hydrographic surveys and robotics system development.
Select variant...
inc. VAT
Product Description
The BlueBoat was born from a desire to make uncrewed surface vessels just as easy to get started with as ROVs and drones. Even with many options on the market, we saw a lot of room for improvement. We started from a clean sheet and designed the vehicle that we wanted to have ourselves, then worked tirelessly to perfect it and make it as affordable as possible. The result is the BlueBoat.
The BlueBoat is the planet’s most affordable surface vessel for hydrographic surveys, robotic systems development, and scientific missions. Its weedless hull and propeller design, rugged construction, and compact transport size make it reliable and convenient to use, while its flexible electronics architecture, ample payload mounting areas, and open-source BlueOS software system make it an ideal platform for integration of sonars and other sensors.
The BlueBoat exists for you to build on top of and is easily and endlessly expandable.
A Hydrographer's Pickup Truck
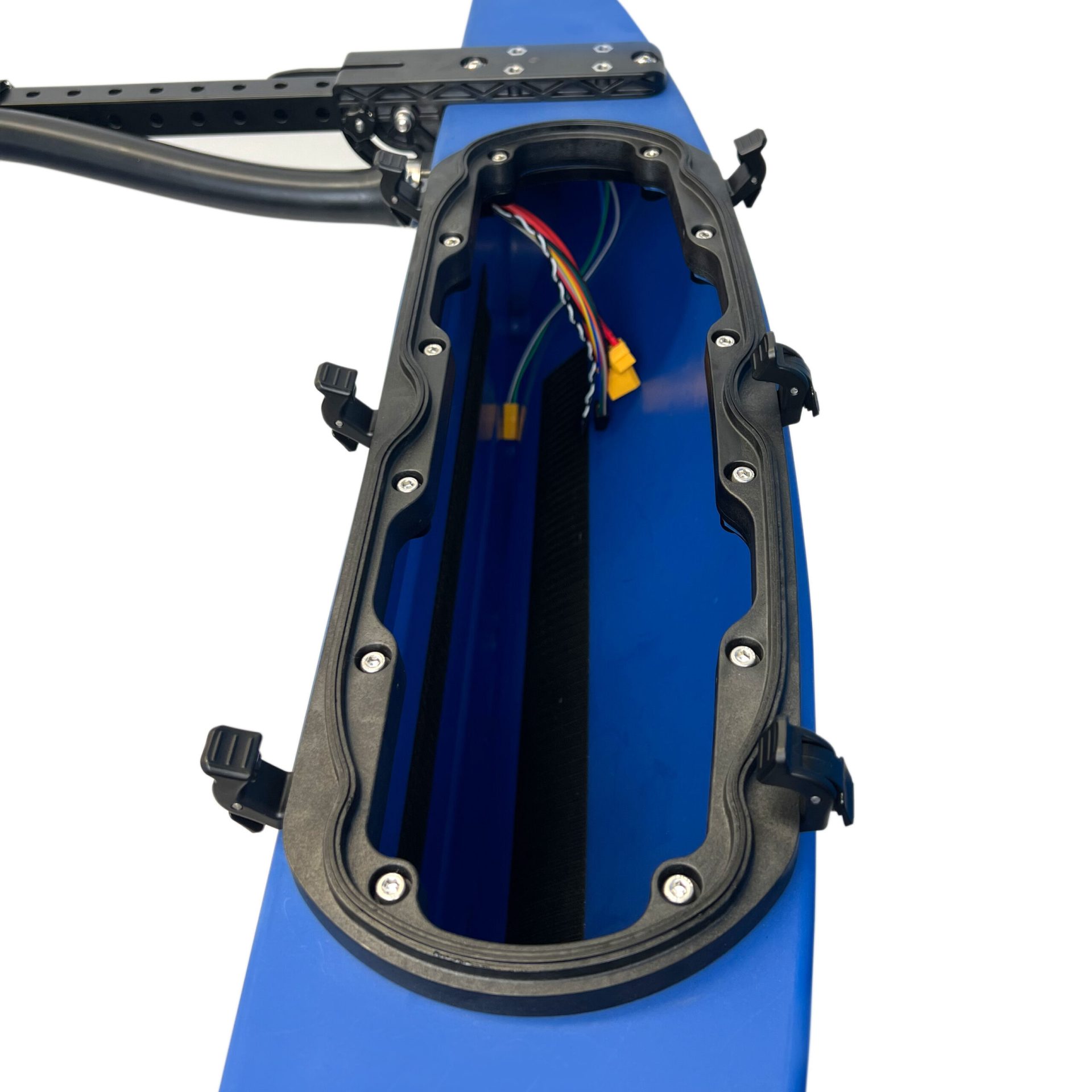
The BlueBoat is designed to carry any payload that you want to integrate and to do so better than any other vehicle its size. We fit all of the control electronics, batteries, and wiring into the hulls so that the space between the hulls is completely dedicated to payload integration. The hulls are designed with flat inner walls, creating a low-wake sensor area ideal for survey sonars.
The BlueBoat can carry up to 15 kg (33 lb) of batteries and payload. The cross members, brackets, and the bottom of the hull have mounting points so that you can mount anything, whether it’s a hydrographic survey echosounder, an enclosure full of prototype electronics, or both!
Electronics areas in both hulls leave plenty of dry space for internal hardware integration with access to dedicated payload power, interhull communications, and holes for electrical penetrators or connectors.
Combined with the open-source BlueOS software system, it’s not just integration friendly, it’s going to be your new bff
Weedless... Like, Actually
From the beginning, our vision for the BlueBoat has been one of reliability and trustworthiness. We knew from our own experiences with the SolarSurfer that getting stuck on weeds or debris quickly turns your uncrewed vehicle into an inconvenient and expensive rescue situation. So we developed a unique design that eliminates that problem.
The BlueBoat’s unique deep hull shape pushes weeds and debris down and out of the way. Anything that isn’t pushed down is brushed away by highly swept weedless propellers driven by two M200 Motors. That means that whether you’re doing a bathymetric survey in a weed-filled lake or studying a plastic-polluted waterway, you can count on the BlueBoat to get it done.
Autonomy Is Not an Option, It Comes Standard
Every BlueBoat includes a Navigator Flight Controller, GPS, and ArduRover control firmware with advanced autonomous navigation capabilities. Out of the box it can perform precision GPS waypoint navigation, position hold at a location, follow-me manoeuvres, geo-fencing, automatic return-to-home if radio signal is lost, and more. Drag and drop mission planning makes it easy to design a complex mission in minutes.
If you prefer to operate the vehicle manually or take pride in smoothly docking it at the end of a mission, you can use a joystick controller to show off your skills.
Ship to Shore aka BlueBoat to BaseStation
The BlueBoat has a long-range wifi radio that connects to the BaseStation box from up to 250 m away using the standard antennas. The BaseStation acts as a wifi access point that you can connect to to interact with the boat. It has an internal battery as well as a USB-C port for charging and a hardwired network connection. If you need more range, it’s compatible with directional antennas that provide a more focused signal towards the BlueBoat.
If you’re operating multiple boats, they can all be connected through a single BaseStation box. In addition to the wifi radios, the BlueBoat will eventually be compatible with other types of communication for longer range, such as 4G LTE and Iridium satellite communications.
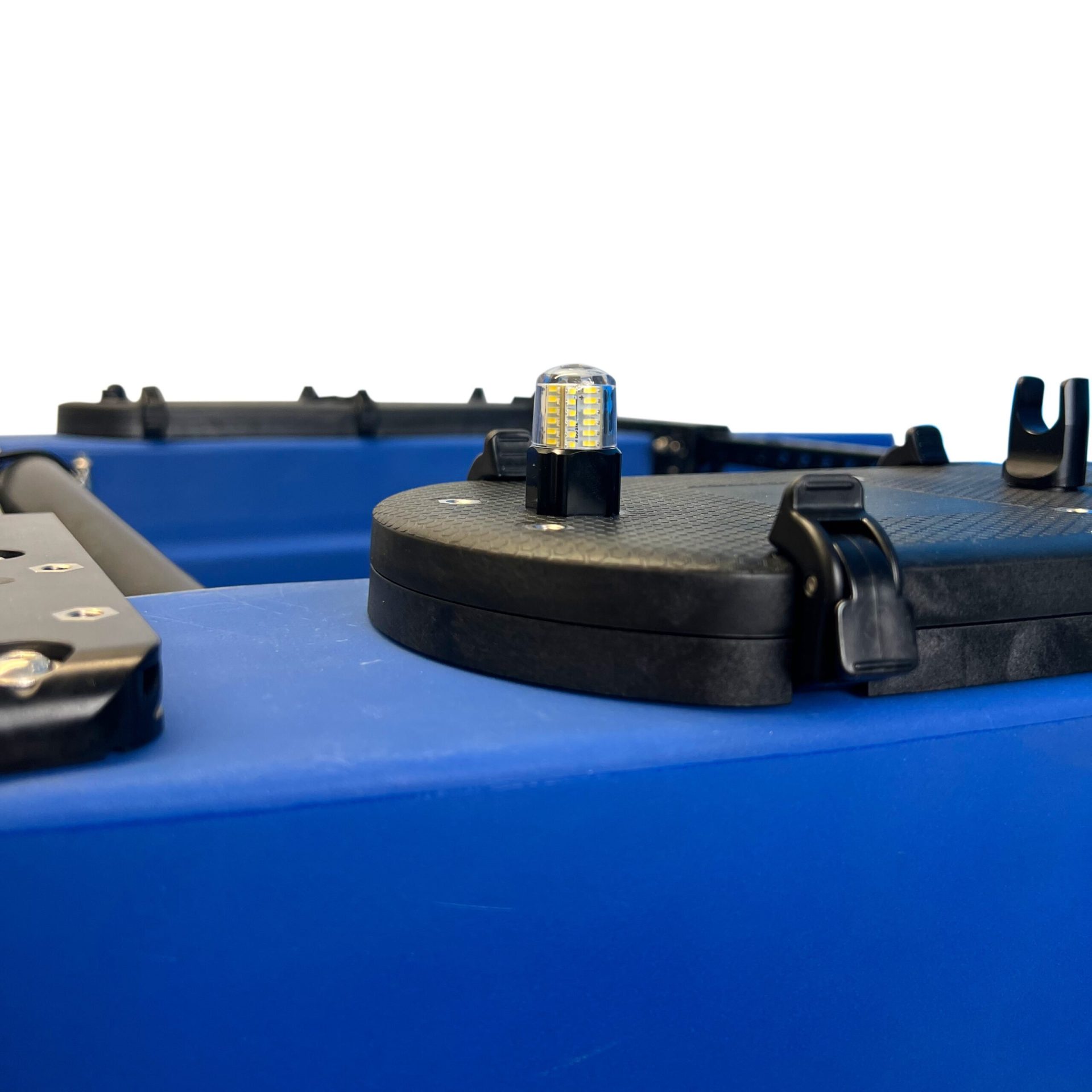
Sea and Be Seen
In a sea of yellow USVs we started wondering… is yellow really the most visible colour on the water?!
Through our research, we found that fluorescent green actually offers the highest visibility, with orange not far behind. So, if you’re looking to be seen out at sea, give a green (or orange, or pink) BlueBoat a try!
Not concerned about visibility? Choose whichever colour floats your boat—we’ve got options!
Missions for Days
Literally! The BlueBoat has best-in-class endurance capabilities with over 60 hours of continuous operating time when carrying the maximum supported number of batteries. Even with a single battery, it runs for upwards of 9 hours and can travel over 30 km.
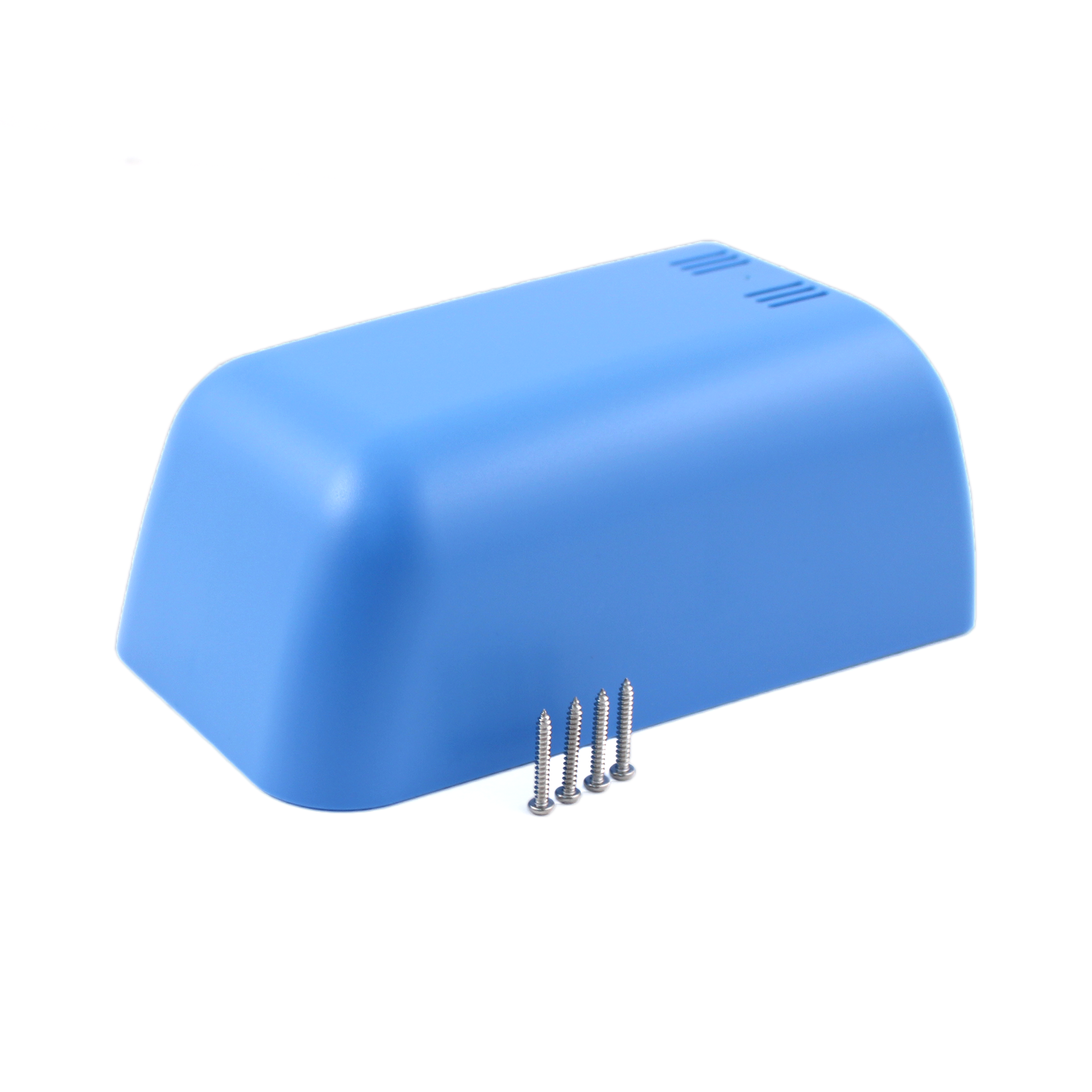
Just Trunks, No Trailers
With a folding hull and frame design, the BlueBoat fits in the boot of just about any car. Quick release handles allow you to switch between the folded and deployed configurations in seconds.
Float Your Boat Without Sinking Your Wallet
The BlueBoat has an affordable price tag compared to other uncrewed surface vessels on the market, but it’s built to rigorous quality standards and designed with years of experience building subsea hardware.
We put attention into every detail, from the labelling on the internal wiring connections to the satisfying *click!* of the latches as you close it up. It can be hard to tell by looking at pictures on the internet, but we can assure you that when you get the BlueBoat in your hands, it just feels right.
Ready to BlueBoat ?
The BlueBoat comes almost fully assembled and only takes a few minutes to get into the water. In addition to the boat, you’ll need a few things to get started:
- Laptop – We recommend a medium to high-end model with Windows 10, Mac, or Linux operating systems. There are also some compatible tablets including the Windows Surface tablets. iOS and Android are not officially supported at this time.
- Battery – We recommend our 14.8v, 18Ah lithium-ion battery for the best battery life, but we can’t ship it to all locations! There are other compatible batteries that can be used as well. We’d recommend getting a few for extended operation.
- Battery Charger – We have a recommended charger as well, but any lithium-ion battery charger that can handle your battery will work!
- Gamepad Controller (optional) – If you want to control the boat manually, we recommend a gamepad controller like the Xbox Wireless Controller.
Technical Specifications
FAQs
Didn't find your answer?
Don't hesitate to contact us.
You May Also Need



Related Products



Can't see what you need or have a query? Please just get in touch…